1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28
29
30
31
32
33
34
35
36
37
38
39
40
41
42
43
44
45
46
47
48
49
50
| import cv2
from pyzbar import pyzbar
camera=cv2.VideoCapture(0)
camera.set(3,1280)
camera.set(4,768)
while True:
(grabbed,frame)=camera.read()
h1,w1= frame.shape[0],frame.shape[1]
dst = frame
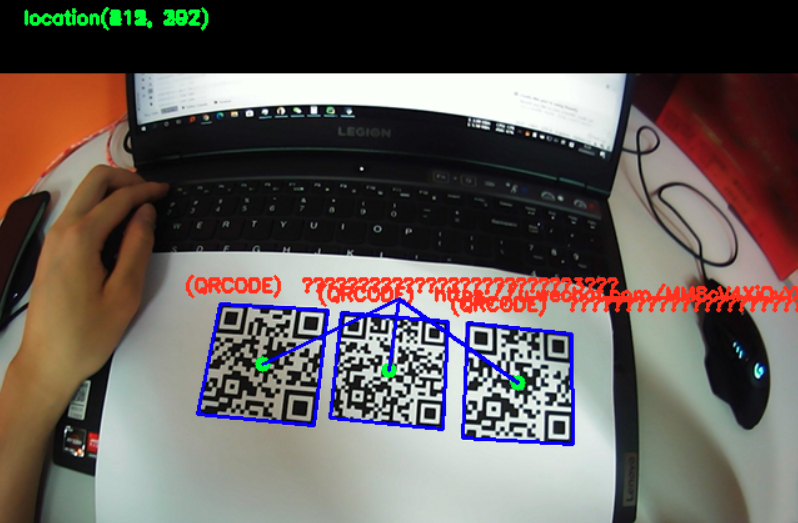
text = pyzbar.decode(dst)
for texts in text:
textdate = texts.data.decode('utf-8')
print(textdate)
(x, y, w, h) = texts.rect
print('识别内容:'+textdate)
cx = int(x + w / 2)
cy = int(y + h / 2)
cv2.circle(dst, (cx, cy), 2, (0, 255, 0), 8)
print('中间点坐标:',cx,cy)
coordinate=(cx,cy)
cv2.putText(dst,'QRcode_location'+str(coordinate),(20,20), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 255, 0), 2)
cv2.line(dst, (cx,cy),(int(w1/2),int(h1/2)), (255, 0, 0), 2)
cv2.line(dst, texts.polygon[0], texts.polygon[1], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[1], texts.polygon[2], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[2], texts.polygon[3], (255, 0, 0), 2)
cv2.line(dst, texts.polygon[3], texts.polygon[0], (255, 0, 0), 2)
txt = '(' + texts.type + ') ' + textdate
cv2.putText(dst, txt, (x - 10, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 50, 255), 2)
cv2.imshow('dst',dst)
if cv2.waitKey(1) & 0xFF == ord('q'):
cv2.imwrite("./frame.jpg", frame)
break
camera.release()
cv2.destroyAllWindows()
|